
Сегодня я поясню Вам, что первая и вторая части рассуждений о компасах, конечно же, преследовали не только теоретически-исследовательскую цель, но и практически применяемую! В моём доме около года назад поселился самодельный квадрокоптер на раме F450, и с момента его сборки я постоянно пытаюсь его улучшить и модифицировать. Так что сначала вкратце расскажу всю его историю.
 Здесь я приведу краткую версию истории, необходимую для понятия последующих действий, а если кто-то заинтересуется подробностями, то можете изучить их в отдельной серии статией на сайте Витебских моделистов.
Здесь я приведу краткую версию истории, необходимую для понятия последующих действий, а если кто-то заинтересуется подробностями, то можете изучить их в отдельной серии статией на сайте Витебских моделистов.
Итак, история этого Пепелаца началась с покупки на Алиэкспрессе набора для новичков для сборки квадрокоптера на раме F450 за 80 с копейками долларов. Набор состоит не из самых современных и качественных комплектующих, однако содержит все необходимые комплектующие (кроме аккумулятора и аппаратуры управления) для запуска квадрокоптера в полёт! Набор включал в себя БК-Моторы 2212 1000Kv с гладкими валами, регуляторы 30A 2-3S, Контроллер APM 2.6, компас-GPS 6M, раму F450 без ног и всего две пары тонких пропеллеров 1045. Чуть позже были докуплены аккумулятор 3S и аппаратура FlySky FS-i6 с приёмником.
 Первая попытка запуска первой версии квадрокоптера прошла неудачно: никто меня не предупреждал, что отрыв от земли нужно осуществлять резко, а ног у квадрокоптера тогда ещё не было. При плавном взлёте квадрокоптер неуверенно пошатывался и зацепил пропеллером землю. Пропеллер, конечно, был безвозвратно повреждён. Дальше было ещё много запусков, много падений, поломок, и в процессе ремонта и модернизации многие детали были заменены на более дорогие и современные, а именно:
Первая попытка запуска первой версии квадрокоптера прошла неудачно: никто меня не предупреждал, что отрыв от земли нужно осуществлять резко, а ног у квадрокоптера тогда ещё не было. При плавном взлёте квадрокоптер неуверенно пошатывался и зацепил пропеллером землю. Пропеллер, конечно, был безвозвратно повреждён. Дальше было ещё много запусков, много падений, поломок, и в процессе ремонта и модернизации многие детали были заменены на более дорогие и современные, а именно:
 Для рамы были докуплены полноценные ноги (была даже попытка напечатать дополнительные ноги на 3D-принтере)
Для рамы были докуплены полноценные ноги (была даже попытка напечатать дополнительные ноги на 3D-принтере)- Полноценная складная стойка приёмника GPS/компаса
- Виброгасящая площадка под полётный контроллер
- Компас/GPS 7M
- Виброгасящий подвес для экшн-камеры
- Моторы были заменены на красные самозатягивающие 2212 920kv со шлицами на валу и с правой и левой резьбой
- Новые пропеллеры 1045 со шлицами (как на моторах) покупались просто десятками, как расходный материал
- Трехосевой подвес для Экшн-камеры
- GPS-Компас M8N
- Регуляторы оборотов 30A 2S-4S

Процесс установки и настройки компаса M8N вызвал определённые проблемы, и все они были описаны мною во второй части рассуждений о компасах.



Испытательный полёт на этом компасе в режимах AltHold и Loiter прошёл удачно. Однако, при полёте в режиме AUTO (запрограммированный полёт по точкам) квадрокоптер повёл себя неадекватно: Он взлетел, уверенно полетел на первую точку маршрута, и кажется даже достиг её, но вдруг остановился на месте и начал плавно снижаться. На тот момент я подумал, что причина в плохой погоде, изношенном или разряженном аккумуляторе или потере его ёмкости из-за низкой (но пока ещё плюсовой) температуры, и решил продолжить испытания уже на новом аккумуляторе.
Кроме этого, меня начало беспокоить короткое время полёта на одном аккумуляторе, а именно — меньше 10 минут. Для решения этой проблемы и был приобретён новый литий-полимерный Аккумулятор 4S 6000mAh.
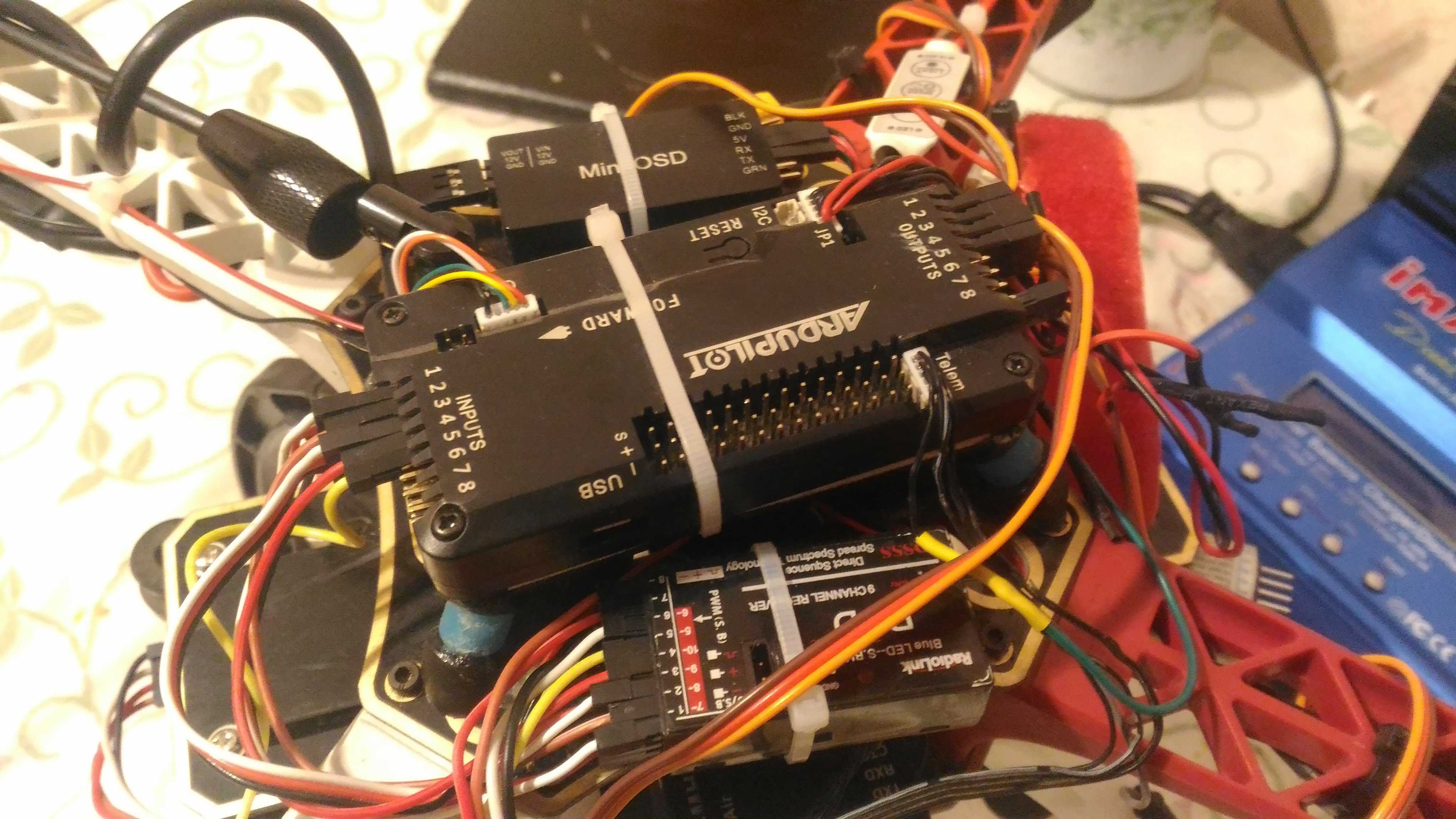
По прибытии нового аккумулятора меня ждал сюрприз: аккумулятор 4S был толще старых и не помещался в своё штатное место, между верхней и нижней пластиной рамы. И поэтому перед испытаниями нового аккумулятора мне пришлось проводить срочную работу по перекомпоновке почти всех деталей квадрокоптера. Всю электронику мне пришлось расположить на старом месте аккумулятора — между пластинами, а сверху на раме я освободил место для аккумулятора.





Аккумулятор показал себя очень хорошо, субьективно время полётов значительно увеличилось (точную цифру назвать не могу, т.к. из-за 5-градусного мороза разрядился аккумулятор камеры, и полёт получился без видеосъёмки. Однако, в режиме AUTO (запрограммированный полёт по точкам) квадрокоптер повёл себя так же плохо: остановился в первой точке.
Но на этот раз я успел увидеть сообщение об ошибке на экране смартфона (использую приложение Tower): DCM bad Heading. Интернет подсказал мне, что такая ошибка возникает, когда направление движения коптера, вычисленное по показаниям GPS сильно отличается от направления движения вычисленного по показаниям компаса. Сильно — это либо 30, либо 60 градусов, по разным источникам. Таким образом, полётный контроллер обнаружил ошибку навигации и во избежание крушения включил FAILSAFE — принудительную посадку прямо в том месте где она была обнаружена, так как возврат на точку взлёта при неисправной навигации непредсказуем.
А это означает лишь одно: мне предстоит новая серия решений проблем с компасом!
На текущий момент я нашёл ещё одно устойчиво работающую ориентацию компаса M8N — это ROLL270, и при этом модуль должен быть повёрнут на 90 градусов вправо по оси YAW (то есть проводом к левой стороне коптера), переклеил компас по новой, прочитал про магнитное склонение, и узнал что для Витебска эта величина составляет +9 градусов, и теперь с нетерпением жду выходных чтобы провести очередные испытания компаса в полёте!