
Как и раньше, я постараюсь рассказать Вам о проблеме, которая отняла у меня много сил и времени и о правильном способе её решения.
Немного теории о видеосъёмке с квадрокоптера
В процессе полёта любой мультироторный летательный аппарат (трикоптер, квадрокоптер, гексакоптер, октакоптер и т.д, а далее назовём его условно дроном) многократно производит наклоны и повороты корпуса в разные стороны. Только за счёт наклонов корпуса дрон способен перемещаться в горизонтальной плоскости, а в процессе сопротивления ветру эти наклоны становятся резче, сильнее и чаще.
В дешёвых дронах видеокамера жёстко прикреплена к корпусу летательного аппарата, иногда закреплена на виброгасящей платформе, но в обоих случаях камера наклоняется вслед за любыми наклонами корпуса дрона. Что мы имеем в результате: Если съёмка велась широкоугольным объективом (например как в Экшн-камерах, типа GoPro), то видео смотрится немного нестабильным, шатающимся, немного неидеальным. А если объектив камеры дешёвый и узкоугольный (как например в дроне Syma X5C), то нестабильность видео достигает таких пределов, что через некоторое время сосредоточенного просмотра начинает кружиться голова.
Для решения этой проблемы были сконструированы двух- и трёх-осевые стабилизационные подвесы для камеры! Стабилизационный подвес — это электронное устройство, удерживающее камеру ровно и в определённом положении (как правило в горизонтальном) независимо от любых наклонов и поворотов дрона.
Немного теории о стабилизационных подвесах
Подвес снабжён одним или двумя датчиками гироскопа/акселерометра, и двумя либо тремя бесколлекторными электромоторами. Датчики дают информацию о текущем расположении дрона и камеры в пространстве, а электромоторы наклоняют камеру в заданное положение и удерживают в нём.
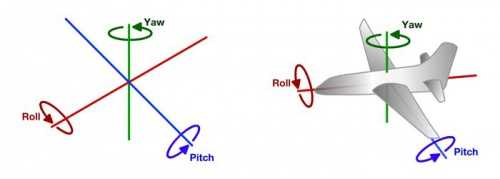
Двухосевой подвес снабжён двумя электродвигателями и стабилизирует камеру по двум осям:
- Ось тангажа — Pitch — наклон камеры вниз и вверх
- Ось крена — Roll — наклон (не поворот!) камеры влево и вправо
Сторонники двухосевых подвесов считают что повороты вокруг третьей оси вращения можно осуществлять поворотом самого дрона.
В трёхосевом подвесе к вышеперечисленному добавляется ещё один электродвигатель и ещё одна ось стабилизации:
- Ось рысканья — Yaw — поворот камеры влево и вправо вокруг вертикальной оси.


Выбор модели подвеса
Если не рассматривать супердорогие профессиональные модели, то весь оптимальный выбор на Китайском рынке сводится к двум разновидностям подвеса на основе Storm32:
- Двухосевой подвес за 35-40$,
- Трёхосевой подвес за 50-55$.
Учитывая небольшую разницу в цене, а также распространённое мнение, что трёхосевой подвес настолько хорошо стабилизирует видео, что его можно использовать без последующей обработки, я конечно решил приобрести именно трёхосевой подвес HakRC Storm32.
Первый опыт использования
Внимание! Подвес запрещается включать без установленной на него камеры!
Подвес заработал сразу «из коробки», не требуя дополнительных настроек. Питания 3S-батареи (12вольт) ему вполне хватило и на столе он быстро и чётко выравнивал камеру при наклонах дрона. Ещё пара проводов, и я уже мог управлять с Аппаратуры управления наклоном камеры по вертикали (ось тангажа — pitch), и я уже гордился полученным результатом! Однако уже первый полёт показал, насколько сильно я ошибался!
В первом же полёте обнаружилась сильная тряска по оси тангажа (pitch). К сожалению, заметил я этот факт только после посадки, при просмотре видеозаписи, когда она уже была безнадёжно испорчена.
Именно с этого случая началось моё подробное изучение вопросов настройки трёхосевого подвеса.
Важные этапы настройки подвеса
Помните, что все настройки подвеса вы выполняете для работы с одной конкретной камерой, и настройки выполняются под её конкретный вес, размер и её расположение! При замене камеры на другую модель возможно придётся производить настройки заново!
Специалисты советуют при настройке выполнять следующие этапы:
- Осмотр и проверка механической части подвеса
- Установка камеры, уравновешивание всех осей
- Перепрошивка контроллера на последнюю версию прошивки
- Калибровка обоих гиродатчиков по 6-ти точкам
- Выполнение визарда «Настройка подвеса» (Setup gimball)
- Проверка и настройка всех параметров, кроме PID
- Настройка PID
И если быть честным, то пункты 3 и 4 я не выполнял, понадеявшись на честность сборки и настройки в Китае, и пока всё работает. А теперь давайте подробно пройдёмся по этим пунктам:
- Механика: Все детали кронштейна должны быть плотно соеденины, должны быть не деформированы, все двигатели должны вращаться свободно без сопротивления, ничего не должно люфтить!
- Камера должна быть уравновешена по всем осям. Если вам не удаётся установить камеру в геометрическом центре платформы и платформа свешивается, скажем, в правую сторону, значит с левой стороны необходимо приклеить противовес, например несколько монеток.
- По прошивке в интернете есть много материала (в том числе видеоуроков), который будет точнее и понятнее моих рассказов, т.к. я этим ещё не занимался.
- Калибровать нужно отдельно датчик на плате и датчик на кронштейне камеры, по одной или по шести точкам. Лучший результат достигается по шести точкам. Рассказывать подробно не буду, а почему? Смотри пункт 3!
- Мастер (визард) позволяет при минимальных действиях пользователя настроить первичные параметры подвеса, а именно: количество полюсов электромоторов, и самое главное: какое положение камеры в пространстве является правильным и первоначальным, и к какому положению подвесу нужно стремиться! Ведь не у всех подвес находится ниже корпуса квадрокоптера, у некоторых спереди или сверху, есть люди которые ставят подвес на велосипед, а некоторые и вовсе, переделывают это устройство в ручной стабилизатор для мобильного телефона!
- Остальные настройки более-менее понятны, хотя и распределены на разных страницах программы настройки. Например: способ удерживания камеры (Hold или Pan), реакция на команды с Аппаратуры управления, порог низкого напряжения питания для отключения подвеса, и т.д. и т.п.
- Настройка PID — это более обширная тема, которая заслуживает если не отдельной статьи, то хотя бы отдельного раздела в нашей статье!
Настройка PID
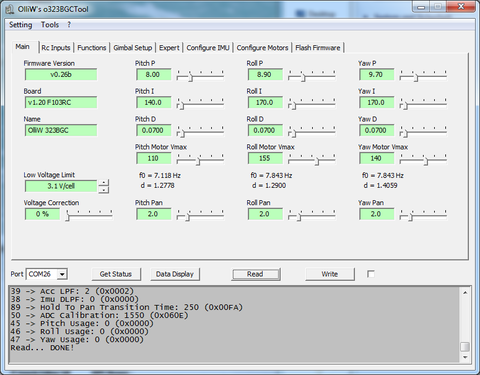
ПИД-регулирование (пропорционально-интегрально-дифференцирующий) — это способ регулирования, управление какой-то системой с обратной связью. Если вкратце, то настройка PID-системы производится тремя параметрами, которые в упрощённом варианте можно описать так:
- P — Насколько сильно показания датчика обратной связи (в нашем случае — показания гиродатчика) должны влиять на поворот регулируемой системы (на электромотор)
- I — Насколько должно увеличиваться влияние датчика обратной связи, если датчик показывает необходимость действя на протяжении какого-то длительного времени
- D — Насколько сильно необходимо продиводействовать последствиям слишком сильного влияния первых двух параметров.
Этой же методикой управляются и некоторые настройки в управлении самим дроном, но сегодня мы их не рассматриваем. Итак! Про настройку ПИД-ов в подвесе информации в интернете очень мало и она очень недостаточная. И самых лучших результатов я достиг, действуя по методике Юлиана из RC SchoolModels, несмотря на то что он в своём видео настраивал подвес другого производителя. Если адаптировать его метод под наш подвес Storm32 то он будет выглядеть примерно так:
- Убрать на ноль все значения параметров P, I, D, VMax по всем трём осям. Подвес повиснет без напряжения.
- Все следующие действия (пункты 3-7) нужно производить по очереди для каждой из осей, в такой последовательности: Roll, Pitch, Yaw:
- Настроить VMax (максимальное напряжение на мотор). Повышать параметр от нуля до того момента, пока мотор не начнёт удерживать камеру в определённом положении. Слишком высокое значение параметра может привести к перегреву моторов или сильному разряду аккумуляторов. Мне хватило значений 80-110 по разным осям.
- Настроить I. Медленно добавлять параметр пока подвес не начнёт самостоятельно шевелить камерой. При этом необязательно добиваться выравнивания камеры, достаточно просто какого-то самостоятельного движения. Мне хватило значений на 1-2 деления от нуля, то есть совсем мало!
- Настроить P. Медленно добавлять параметр от нуля, пока подвес не начнёт притягивать камеру именно к её нормальному (горизонтальному) положению. При этом на вибрацию или тряску обращать внимания не нужно.
- Настроить D. Медленно добавлять этот параметр до тех пор пока не прекратиться вибрация. При слишком большом значении параметра может начаться высокочастотная вибрация по указанной оси.
- Если при помощи параметров P, I, D не удаётся уравновесить оси или избавиться от вибраций — попробуйте уменьшить параметр Vmax по этой оси и повторите пункты 4-7.
- Повторить пункты 3-7 для оставшихся осей.
- Проверить работу всех осей, сохранить настройки.
В ПО настройки подвеса есть возможность сохранять настройки в файл. Советую делать это до и после любых изменений.
После выполнения всех вышеуказанных рекомендаций подвес мой заработал стабильно и надёжно, и видео стало ровным и красивым. Осталось подумать как уменьшить вибрацию передаваемую от пропеллеров, но это уже другая история!
Добрый день. Очень надо настроить storm32 . Позвоните мне, пожалуйста. по цене договоримся. ноль 29 двести48 пятьдесят6 26. Срочно надо. Спасибо.