Уважаемые читатели! Кое-кто из наших авторов, совместно со Студией 3Д-печати 3DADA в ближайшее время планирует создание авторской модели квадрокоптера на собственной раме, напечатанной на 3д-принтере!
Следите за публикациями на нашем сайте!
Витебский городской портал любителей делать что-то полезное своими руками
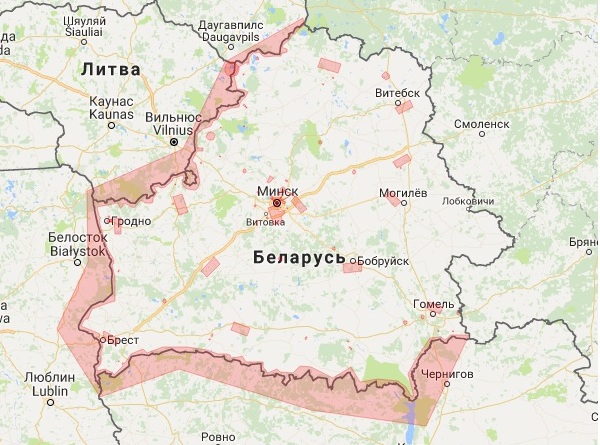
Владельцы авиамоделей могут самостоятельно изучить онлайн-карту бесполётных зон РБ на нашем сайте! На территории этих зон запрещено использование авиамоделей без особого разрешения. Короткая ссылка на карту: https://goo.gl/GnfaH7

Уважаемые читатели! Кое-кто из наших авторов, совместно со Студией 3Д-печати 3DADA в ближайшее время планирует создание авторской модели квадрокоптера на собственной раме, напечатанной на 3д-принтере!
Следите за публикациями на нашем сайте!

При подключении новых пользователей приходится икать свободные порты на коммутаторах.
Порты заняты все, но часть не горит.
Возникла необходимость определять, подключено ли физически устройство на другом конце.

Здравствуйте, уважаемые читатели! Сегодня я хочу рассказать Вам свою историю долгой борьбы с модулями компаса и GPS при настройке квадрокоптера на контроллере AMP. Пишу статью по большей части чтобы упорядочить полученный мною опыт, который может быть кому-то пригодится, а может быть более опытные читатели подскажут мне правильное решение проблемы!

Однажды мне захотелось сделать не робота и не игрушку а что-либо полезное в домашнем хозяйстве. Контроллер Ардуино, подключенный через модули реле способен управлять даже высоковольтными проводами.
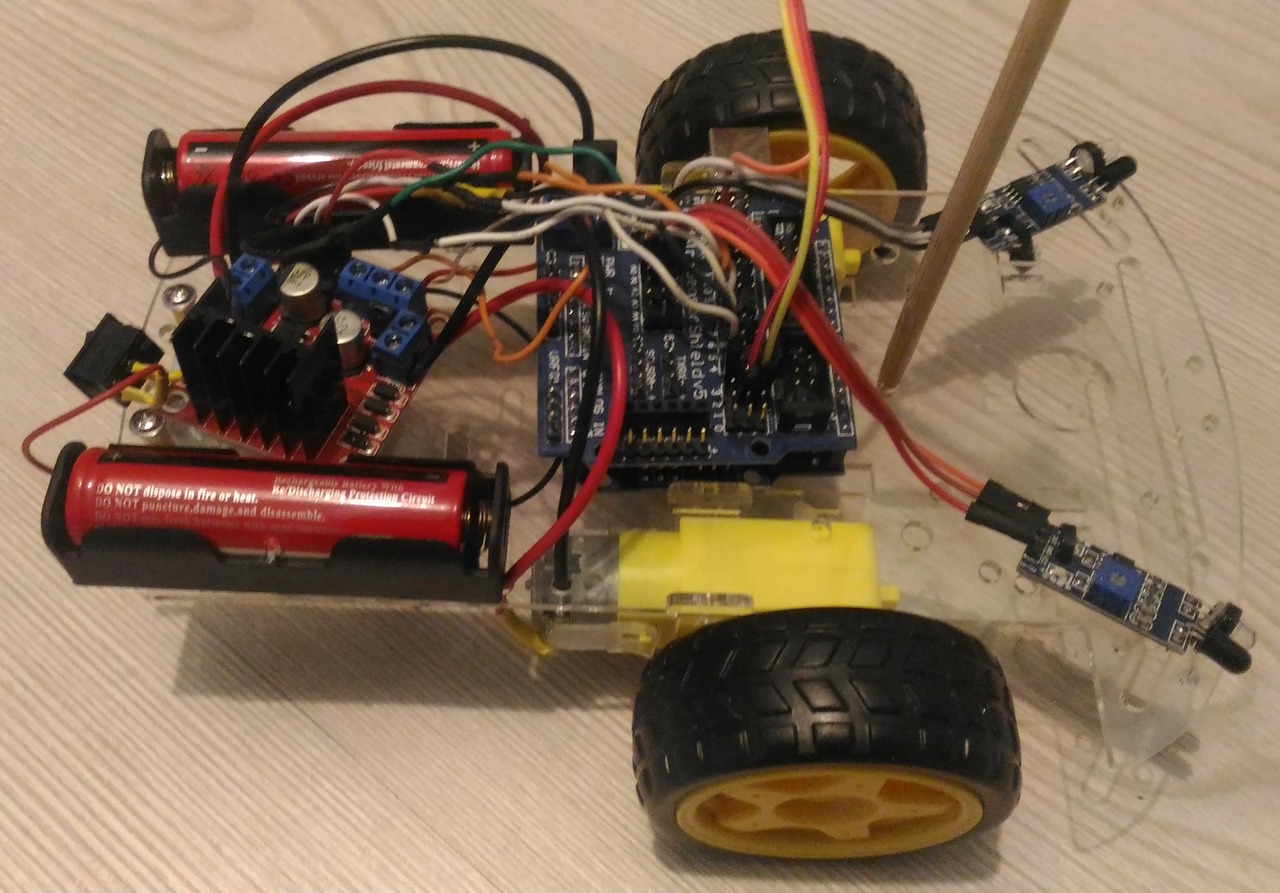
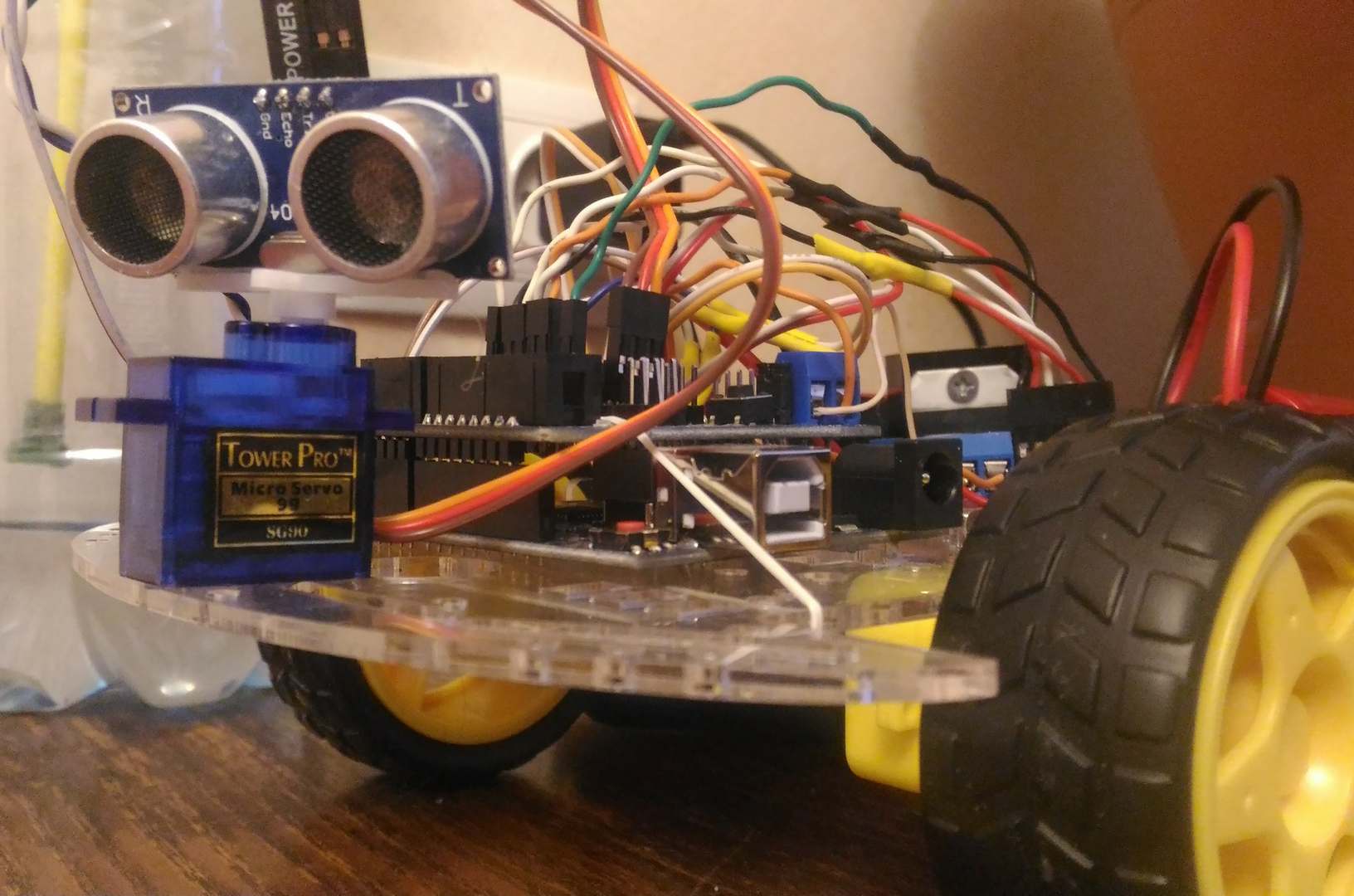
На выходных я получил из Китая очередную посылку с модулями для Arduino, и сразу же захотел применить их для уже знакомого нам робота-автомобиля. Тем более, что две попытки взлёта квадрокоптера обернулись неудачей и до прибытия новых пропеллеров работы по нему всё равно приостановлены.
Для компьютера — программа,
Для смартфона — приложение,
Для ардуино — скетч
В процессе сборки квадрокоптера F450 я удивлялся, как маленькая электронная плата может успевать получать данные, поступающие от всех датчиков (пульт управления, гироскопы, акселерометры, барометр, компас и GPS), обрабатывать их и на их основании управлять тягой каждого из моторов в отдельности, не давая при этом аппарату опрокинуться и заставляя его перемещаься в нужную точку! Оказывается вполне даже может, т.к. собран его полётный контроллер на базе микроконтроллера Arduino Mega.

Итак, для самостоятельной сборки квадрокоптера на раме F450 мы уже выбрали и заказали комплектующие, а также изучили список недостающих деталей. Сегодня поговорим о не менее необходимой вещи для любой радиоуправляемой модели, а именно — об аппаратуре управления, или попросту о пульте.

Итак, после долгих раздумий и выборов, а также основываюсь на уже имеющихся знаний о квадрокоптерах, мною было принято решение собирать кастомный квадрокоптер на базе рамы F450.
F450 — это популярная рама для сборки квадрокоптеров с расстоянием между диагонально расположенными двигателями примерно 450мм. Рама состоит из двух текстолитовых площадок и четырёх пластиковых лучей, присоединяемых к площадкам.

Эпиграф:
Я взрослый, состоявшийся мужчина,
и мне просто необходим
этот радиоуправляемый вертолёт!
Здравствуйте уважаемые читатели!
Прежде всего хочется поблагодарить Хозяина за предоставленное слово и выразить надежду, что поднятая мною тема не слишком выйдет за границы тематики сайта. Я хочу поговорить об отдельном классе моделирования — о действующих радиоуправляемых моделях, а именно — о квадрокоптерах!